Login
Support Sailonline
If you haven't already - join the SAILONLINE YACHT CLUB!
Please also consider making a donation - all amounts are greatly appreciated!
|
Posted by Roddo  |
|
|
Hi All,
I'm really keen to understand VMC a lot better, in fact any understanding would be better than I know at the moment. I've read a few posts on VMC and sort of understand that if you expect a shift on the course then you need to sail to a point to take advantage of the shift and get on a higher rung. I'd very much like to understand the mathematics of arriving at the number. So I've attached a screen shot of AGage's optimum angles tool for the current tallships race and wonder how the VMC TWA is calculated. I'm also wondering why there is no-one on that VMC course - and in general in any of the races and consequently how I can use it to assist with which heading to take. Cheers Rod |
|
|
Posted by kroppyer  |
|
|
outlaw wrote a couple of posts about VMC on solfans, if you haven't read them, be sure to do so.
There are two parts to this VMC thing: 1. understanding VMC, how to calculate and guesstimate it, understanding the relation between the polar, TWA, BRG, VMC and isochrones. 2. figuring out the BRG to use during the race. 1. understanding VMC It's a very geometric/graphic concept. Go to a race where you're currently racing. Zoom in all the way to max zoom. Double click the steering wheel button. You'll see a polar drawn around your boat. Your pink predictor line cuts this polar right in front of you. Imagine you're standing at the crossing of your predictor line and the polar, you're looking in the direction of your predictor line. Now raise/straighten you arms, (like you're an airplane  ). Turn a little so that your arms align with the polar line. When you've done that, you're no longer looking in the direction of the predictor line. You're looking in a different direction. This is a special direction since all of the polar is "behind" you. Whatever other angle people right next to you would be sailing, they can't get across your stretched arms. This is the whole point of sailing with VMC. Make sure that while sailing you don't turn too much (your boat may change course, but your arms should stay out aligning with the polar, and you should stay looking in the same direction). As soon as you start turning your body, to the left for example, people on the left have a chance to get ahead of your stretched arms. You have to keep them behind you. ). Turn a little so that your arms align with the polar line. When you've done that, you're no longer looking in the direction of the predictor line. You're looking in a different direction. This is a special direction since all of the polar is "behind" you. Whatever other angle people right next to you would be sailing, they can't get across your stretched arms. This is the whole point of sailing with VMC. Make sure that while sailing you don't turn too much (your boat may change course, but your arms should stay out aligning with the polar, and you should stay looking in the same direction). As soon as you start turning your body, to the left for example, people on the left have a chance to get ahead of your stretched arms. You have to keep them behind you.
Now let's say the wind changes, both in angle and speed. This means if you don't turn you boat, you have to turn your body in order to align your arms with the polar again. We've just said that when you turn your body, you lose. So you need to change the course of your boat, but where to? Enter the direction you're looking at into AGages opt.angles tool, press "VMC" and there you go, it says what angle you should sail. Now this is a very effective way to keep people behind you. But the other thing is that you need to get to the finish... This is where you need to choose the correct initial BRG to start. If you choose well, you shouldn't need to turn your body (change your BRG) too much to get to your next waypoint (the finish, the next mark, some cape you need to round, etc.) 2. figuring out the BRG to use The screenshot shows "VMC to next waypoint", which (to the knowledge of AGages optimum angles) is the next mark to round. The good new is that the bearing to this "next waypoint" is usually no more than 90 degrees off. The bad news is that it is usually off. I'm racing in the tallships race (CiC - Cadiz to A Coruna) using VMC. VMC only. I'm using my own program SPINNACER for that. It has an autopilot that send commands automatically based on a bearing the user enters. For the duration of the race, I have entered values between 290 and 295. I'm not sure if these turn out to be the correct bearings, maybe I should'be used a bearing of 300, or 280. The difficult part is determining what bearing to use, but there is a thing that can help you: - Your bearing should not change too much over time. How much is changes over time depends on how much the wind speed changes spatially. - When you tack, your bearing is equal to the TWD, when you gybe its equal to TWD+180⁰. In the tall ships race there was a tack after the start (if you went north first). I determined roughly when and where I wanted to tack, and found that the TWD was between 290 and 295. So I used some bearings between 290 and 295. In a couple of hours there's a new tack coming up, I'll tack when the wind shifts to somewhere between 290 and 295. And then later I'll tack back when the TWD shifts back to an angle larger than 295. Hopefully I'll end up exactly at the next mark using bearings close to 295, as that means I've been sailing roughly the correct bearing up to that point. But it may very well be that when I don't change my bearing, I'll end up too much north or south. In general (without a router): eyeball a route to your waypoint. Determine the BRG at different points along the route. If they differ too much, adjust your route to have a more constant BRG. Once you have a route with a roughly constant BRG and you end up at your next waypoint, you're good to go. The only way for people to get past you now is when they are in a position where they have more wind or a better TWD than you have. --- Last Edited by kroppyer at 2016-08-01 10:11:01 --- |
|
|
Posted by Schakel |
|
|
So, that's what they were doing.
Who knew. |
|
|
Posted by Roddo |
|
|
Kroppyer - thankyou. I've been looking at your SPINNACER - amazing. I reckon the hardest thing for you was the acronym - haha. I've been reading over and over as well as outlaws post and I reckon I'm nearly there.
Just don't quite get how to arrive at the bearing. Agage's Optimum Angle uses the bearing to the next mark but you seem to use the average TWD and Outlaw seems to use the TWD later in the leg. So trying to find my own answer; Tacking (inside upwind VMG) Bearing=TWD perhaps with a skew towards the TWD later in the leg Reaching Bearing=Bearing to Mark Gybing (inside downwind VMG) =same as tacking VMC=VMG when bearing is 0,180 Once this gets us to the VMG laylines then we're on the layline?? Am I close?? PS - does your autopilot have land avoidance? Schakel - hahaha --- Last Edited by Roddo at 2016-08-05 13:28:07 --- |
|
|
Posted by outlaw |
|
|
Hi I've actually gone and made another post on the topic. Tell me what you think, maybe it's easier to understand.
http://solfans.org/blog/sailing-by-the-numbers/vmc-revisited/ Two comments on the last post. VMC to waypoint is pointless on a fundamental level, that's just some random bearing with no real meaning. It does matter for DTF purposes. DTF is of course also pointless. Once this gets us to the VMG laylines then we're on the layline?? If I understand this right, VMG layline is when you barely make it to the mark on VMG? With a proper VMC course you will tack a bit later than that. |
|
|
Posted by Rod  |
|
|
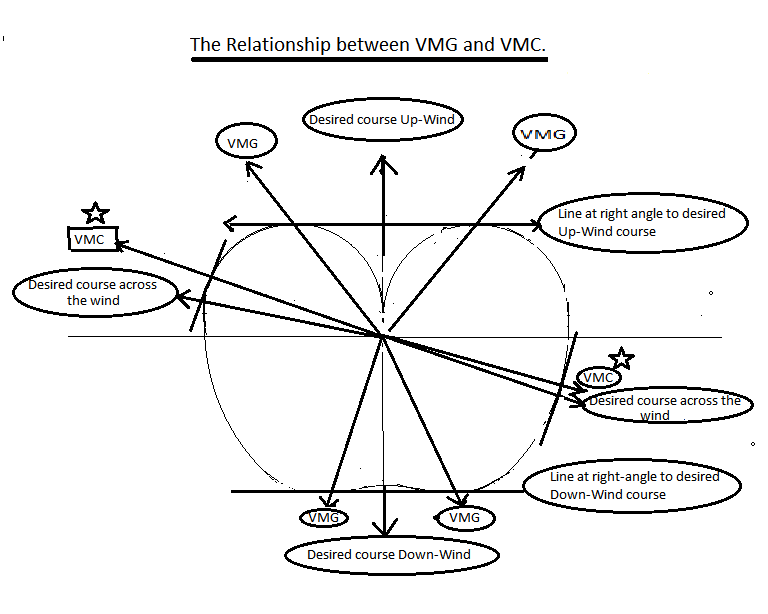
It needs to be pointed out that VMG is merely two special cases of VMC, where you need to go either up or down wind. If you need to go somewhere else, then VMC is needed.
If you look at the geometry of VMC, you will find that VMC is the point that is tangent to the Polar curve. (This is the point where a line at right angles to your desired destination is the tangent to the polar curve (VMG is exactly the same, where your desired destination is just the general direction up or down wind)). It should be added that it is no use plotting a VMC that is closer to the wind than the VMG---'pinching' is not the way to greater speed! VMC (and of course VMG) merely shows you the fastest speed your boat is capable of, in any direction. VMG and VMC in SOL ___________ --- Last Edited by Rod at 2016-10-16 03:03:54 --- --- Last Edited by Rod at 2016-10-17 04:15:57 --- If it breaks, it's not strong enough--if it doesn't, it's too heavy. |
|
|
Posted by JB  |
|
|
Dear Rod, Huib and Roddo,
Let’s clear this a bit, I hope. “Velocity Made Good” represents the module of the vector projection on some chosen direction. In the sailing world “VMG” or ”Velocity Made Good” is (wrongly) used as “VMG” on “Wind”. For “VMG” the projection of the BS vector (“BS” = Boat Speed”) is in the direction of the Wind. For “VMC” the projection of BS vector is on the “Course” (different from “Heading” = “HDG”) you want your boat to take or on the “Course” the boat is already sailing. Formally speaking “VMC” is the same as “VMG” as, again, both represent a vector projection on some chosen direction. “VMG” only depends on the boat Polar via the BS, it is something intrinsic to each boat. VMC depends on the BS and on the “Course” you want to take. With a constant pair (TWA ; TWS) to sail and a simple and clear sailing course from “A” to “B”, the “VMC” calculation is easy because there’s only one target point for reaching: “B”. The issue with “VMC” starts when you have a variable pair (TWA ; TWS), or Nature at work, you have land crossed by the boat path, well, also Nature, and/or also compulsory race marks to be rounded. In this case you have several target points to achieve (better wind zones and geometric constrains) and so different “VMC’s” all along the boat course. To get the things a little nasty, you can even think of “VMC” calculated in relation to the initial race Orthodromic line between Start and Finish and/or between the initial race Loxodromic line (or rhumbline) and duplicate that calculations for the actual Orthodromic line and/or the actual Loxodromic line, assuming the boat has already moved from the Starting line (#4 different calculations for “VMC”, depending on the precision you want/need). Hope I’ve made some light on those two definitions. Big Hug to all. Sail Fair. |
|
|
Posted by Rod |
|
|
Dear JB---
I read your Forum entry, (above), with interest and puzzlement:- 'module of the vector projection on some chosen direction' left me scratching my head in the afore-mentioned 'puzzlement'. The next sentence also puzzled me--what about down wind? Again in the third sentence. What exactly do you mean by the term 'projection of the BS vector'? I would reverse the expression that VMC is the same as VMG--rather VMG is just a pair of special cases of VMC,(directly 'up and 'down' wind). I agree totally with your paragraph "With a constant pair (TWA : TWS) to sail from A to B--", but am puzzled by the next paragraph. Obviously if the wind varies along your desired route, several recalculations of your course would be required. Your next paragraph about the 'nasty' caused much scratching of my head--I do not understand what you are writing about. It is possible that my math terminology is out-of-date with increasing age, but it does seem to me that this is a simple geometric problem. The speed in any direction is shown by the line of the polar. In an ideal boat which made the same speed in all directions, the polar curve would be a perfect circle--but sailboats have polars with variable curvature. This means that a greater speed in the desired direction will be at an angle to the direct course. This angle is chosen as the point where a line at right angles to the desired direction touches (is at the tangent to ) the curve of the polar. This has nothing to do with Orthodromic, Loxodromic, Rhumb or Starting lines, and the precision of the calculation is whatever you desire. One point that has not been discussed (to my knowledge) is that, on any VMC course, the angle to the desired 'destination point' is constantly changing, and that therefore the calculation (or geometric estimation) of the VMC course must also be constantly repeated. Also, I have never seen any discussion about the situation where the VMC-calculated course is closer to the wind than the VMG-calculated course. Personally, I am more "visually" oriented than "mathematically" inclined, so I do all of my VMG and VMC determinations with a small plastic set-square and a small plastic protractor, directly on the surface of my computer screen. It is quick, direct, and prevents arithmetic and multiplication errors, which creep in with the previously mentioned advancing age.... Likewise, as Trump says, big hugs to all who permit that sort of thing... --- Last Edited by Rod at 2016-10-20 14:11:09 --- If it breaks, it's not strong enough--if it doesn't, it's too heavy. |
|
|
Posted by outlaw |
|
|
There's two big problems in this discussion, one being linguistic. That is Angle, Bearing, Course & Direction meaning approximately the same thing. Just how it is. Work it out yourself.
Second is the extremely unfortunate fact that "bearing to the next mark" is somehow the default course for VMC calculations. As Rod correctly observes ...on any VMC course, the angle to the desired 'destination point' is constantly changing, and that therefore the calculation (or geometric estimation) of the VMC course must also be constantly repeated. Just don't do that. VMC to the next mark, and by extension DTF is as important as the weather in Shimane two days from now. My assertion is simply that if I make up some number, say 152 degrees, then express the boat speed as a course (152) vector and a normal (62) vector, then always choose the point of sail that maximizes the course vector. I call that VMC152. If I sail VMC152 for six hours I expect to be the 152-degree-most boat in the fleet. The corrolary is if I happen to end up at the mark, I will round the mark first. That leaves two minor issues, first while this works over six hours, it absolutely will not over six days. And second the need to get the VMC direction right, where estimating TWD at the next tack is the most obvious approach. |
|
|
Posted by kroppyer |
|
|
For the people familiar with geometry this shouldn't be too difficult to understand. For a lot of others, this may be impossible to understand without some clear visuals (which should also solve the linguistic problem outlaw mentioned). Still images may not be enough.
I have had the intention of creating a number of animations explaining, in order: 1. The polar; 2. VMG (upwind and downwind); 3. VMC (360 degrees); 4. How using VMC to determine you course is fastest when TWS/TWD change over time (possibly including the slow/fast wally concept); and 5. How to change the bearing you use for your VMC calculation, when TWS/TWD vary over space. I made the first two animations two years ago (see attached files), but it took me too much time to continue with the slightly more complicated ones. If you have experience with creating animations and the time to create these animations, PLEASE let me know. I think it would be very valuable to have these animations, especially the fourth one. SOLers now and in the future will thank you, and possibly the odd IRL sailor wandering on the internet as well. |
Races
Next Race: 00d 00h 00m
Current Races:
Magical Mediterranean 2026 - Benghazi to Korcula

We return to Antiquity’s Middle Sea for a seventh celebration of all things Mediterranean - fickle winds, history and olive oil. This time we will sail from ancient Benghazi, whence once grain shipped continuously to feed Rome’s urban masses, to the medieval Venetian thalassocracy’s port of Korcula, birthplace of Marco Polo; 700nm in classy Club Swan 50s!
Race #1978
INFO by brainaid.de
Club Swan 50 PARTICULARS
WX Updates:
0430 / 1030 / 1630 / 2230
Ranking: MED - SYC
Race starts: Jul 27th 15:00
Registration Open!
Red Eye 2026 - Georgian Bay

Race #2051
INFOby brainaid.de
Fareast 31R PARTICULARS
WX Updates:
0430 / 1030 / 1630 / 2230
Ranking: RED - SYC
RACE CLOSE: Monday,
August 3 at 2300 UTC.
Race starts: Jul 26th 08:00 Registration Open!
GO TO RACE
Tall Ships 2026 - Stavanger to Aalborg
Welcome to the fourth of four virtual Tall Ships Races in European waters which are concurrently being organized in-real-life by Sail Training International . This fourth race is from Stavanger in Norway into the Skaggerak to a finish off Denmark’s Aalborg and perhaps an Aquavit to toast the adventure afterwards – a final circa 250nm in Sailonline’s classic Clipper 240.
NOTE: Starts and Finishes in tall ships racing are always offshore to avoid conflict with shipping and shipping lanes; online and real-life may not match exactly.
Race #1995
INFO by brainaid.de
Clipper 240 PARTICULARS
WX Updates:
0430 / 1030 / 1630 / 2230
Ranking: TSI - SUPBUD - SYC
Race starts: Jul 25th 16:00 Registration Open!
GO TO RACE
Chinook Salmon - Canada to Andreanovs

A year after spawning in the upper reaches of the rivers of British Columbia, Chinook Salmon develop the age-old urge, so familiar to SOLers, to go to sea, heading for different parts of the northern Pacific Ocean. This race catches up with a particular school with an instinctive memory for the Andreanov Islands far west on the Aleutian Islands chain, as they depart the Salian Sea between Vancouver Island and the San Juans. It’s 2200nm and we’re taking the 60ft Trimaran, in the hope we can keep up!
Race #2048
INFOby brainaid.de
60ft Trimaran PARTICULARS
WX Updates:
0430 / 1030 / 1630 / 2230
Ranking: MIG - SYC
Race starts: Jul 21st 11:00 Registration Closed
GO TO RACE
Juventud TIMED Race 2026

This is a TIMEDrace so you may RE-REGISTER HEREto try again after finishing a run. You will have two weeks to test your skill and decision making after the race opens.
Race #2049
INFOby brainaid.de
The boat for this race is the sporty Mini 6.5p Foil PARTICULARS
WX Updates:
0430 / 1030 / 1630 / 2230
Ranking:
TRQ3 - TRCH - SYC
RACE CLOSE: Saturday,
1 August at 23:00 UTC
Race starts: Jul 19th 12:00 Registration Open!
GO TO RACE
Alaska to Easter Island 2026

INFO by brainaid.de
Imoca 60 Foil v2 PARTICULARS
WX Updates:
0430 / 1030 / 1630 / 2230
Ranking: OCQ3 - RNW - OCCH - SYC
RACE CLOSE: Saturday,
August 1 at 2300 UTC.
Race starts: Jul 06th 11:00 Registration Closed
GO TO RACE
SYC Ranking

{kind=link}
Series
- SYC ranking
- 2026 TSI
- 2026 TRQ4
- 2026 TRQ3
- 2026 TRQ2
- 2026 TRQ1
- 2026 TRCH
- 2026 TQD
- 2026 SUPerBUDdy
- 2026 SSANZ
- 2026 SPQ4
- 2026 SPQ3
- 2026 SPQ2
- 2026 SPQ1
- 2026 SPCH
- 2026 SHE
- 2026 ROW
- 2026 RNW
- 2026 RNI
- 2026 RMI
- 2026 RED
- 2026 OCQ4
- 2026 OCQ3
- 2026 OCQ2
- 2026 OCQ1
- 2026 OCCH
- 2026 NIA
- 2026 MIG
- 2026 MED
- 2026 LOOR
- 2026 CCZ
- 2026 BOL
- 2026 B2B
- 2025 TS
- 2025 TRQ4
- 2025 TRQ3
- 2025 TRQ2
- 2025 TRQ1
- 2025 TRCH
- 2025 TD
- 2025 SuperSOLer
- 2025 SSANZ
- 2025 SPRCH
- 2025 SPQ4
- 2025 SPQ3
- 2025 SPQ2
- 2025 SPQ1
- 2025 SHE
- 2025 SBB
- 2025 RWW
- 2025 RMI
- 2025 RED
- 2025 OCQ4
- 2025 OCQ3
- 2025 OCQ2
- 2025 OCQ1
- 2025 OCCH
- 2025 NT
- 2025 LOOR
- 2025 DN
- 2025 B2B
- 2025 ARQ4
- 2025 ARQ3
- 2025 ARQ2
- 2025 ARQ1
- 2025 ARCH
- 2025 ABS
- 2024 TS
- 2024 TRQ4
- 2024 TRQ3
- 2024 TRQ2
- 2024 TRQ1
- 2024 TRCH
- 2024 TD
- 2024 SVF
- 2024 SUPerSOLer
- 2024 SSANZ
- 2024 SPRQ4
- 2024 SPRQ3
- 2024 SPRQ2
- 2024 SPRQ1
- 2024 SPRCH
- 2024 SHE
- 2024 RTW
- 2024 RMS
- 2024 OCQ4
- 2024 OCQ3
- 2024 OCQ2
- 2024 OCQ1
- 2024 OCCH
- 2024 LOOR
- 2024 HILAT
- 2024 GWT
- 2024 DN
- 2024 CRW
- 2024 B2B
- 2024 ARQ4
- 2024 ARQ3
- 2024 ARQ2
- 2024 ARQ1
- 2024 ARCH
- 2023 TS
- 2023 TRQ4
- 2023 TRQ3
- 2023 TRQ2
- 2023 TRQ1
- 2023 TRCH
- 2023 TD
- 2023 SVS
- 2023 SUPerSOLer
- 2023 SSANZ
- 2023 SPRQ4
- 2023 SPRQ3
- 2023 SPRQ2
- 2023 SPRQ1
- 2023 SPRCH
- 2023 SHE
- 2023 RTW
- 2023 RNI
- 2023 RMS
- 2023 PIC
- 2023 OCQ4
- 2023 OCQ3
- 2023 OCQ2
- 2023 OCQ1
- 2023 OCCH
- 2023 LOOR
- 2023 DN
- 2023 ARQ4
- 2023 ARQ3
- 2023 ARQ2
- 2023 ARQ1
- 2023 ARCH
- 2022 TRQ4
- 2022 TRQ3
- 2022 TRQ2
- 2022 TRQ1
- 2022 TRCH
- 2022 TD
- 2022 Tall Ships
- 2022 SUPerSOLer
- 2022 SSANZ
- 2022 SSA
- 2022 SPRQ4
- 2022 SPRQ3
- 2022 SPRQ2
- 2022 SPRQ1
- 2022 SPRCH
- 2022 SHE
- 2022 OCQ4
- 2022 OCQ3
- 2022 OCQ2
- 2022 OCQ1
- 2022 OCCH
- 2022 NTR
- 2022 LOOR
- 2022 CTR
- 2022 ARQ4
- 2022 ARQ3
- 2022 ARQ2
- 2022 ARQ1
- 2022 ARCH
- 2021 TRQ4
- 2021 TRQ3
- 2021 TRQ2
- 2021 TRQ1
- 2021 TRCH
- 2021 TD
- 2021 Tall Ships
- 2021 SYCQ4
- 2021 SYCQ3
- 2021 SYCQ2
- 2021 SYCQ1
- 2021 SYCCH
- 2021 SUPerSOLer
- 2021 SSANZ
- 2021 SPRQ4
- 2021 SPRQ3
- 2021 SPRQ2
- 2021 SPRQ1
- 2021 SPRCH
- 2021 Shetland
- 2021 PAC6
- 2021 OCQ4
- 2021 OCQ3
- 2021 OCQ2
- 2021 OCQ1
- 2021 OCCH
- 2021 ESRW
- 2020 TSE
- 2020 TSA
- 2020 TRQ4
- 2020 TRQ4
- 2020 TRQ3
- 2020 TRQ2
- 2020 TRQ1
- 2020 TRCH
- 2020 Tasman Double
- 2020 SYCQ4
- 2020 SYCQ3
- 2020 SYCQ2
- 2020 SYCQ1
- 2020 SYCCH
- 2020 SUPerSOLer
- 2020 SSANZ
- 2020 SRQ4
- 2020 SRQ3
- 2020 SRQ2
- 2020 SRQ1
- 2020 SPRCH
- 2020 Shetland
- 2020 RTW
- 2020 RNI
- 2020 Odyssey
- 2020 OCQ4
- 2020 OCQ3
- 2020 OCQ2
- 2020 OCQ1
- 2020 OCCH
- 2020 A3
- 2019 TRQ4
- 2019 TRQ3
- 2019 TRQ2
- 2019 TRQ1
- 2019 TRCH
- 2019 Tasman Double
- 2019 Tall Ships
- 2019 SYCQ4
- 2019 SYCQ3
- 2019 SYCQ2
- 2019 SYCQ1
- 2019 SYCCH
- 2019 SUPerSOLer
- 2019 SSANZ
- 2019 SRQ4
- 2019 SRQ3
- 2019 SRQ2
- 2019 SRQ1
- 2019 SPRCH
- 2019 Shetland
- 2019 Round New Zealand
- 2019 OCQ4
- 2019 OCQ3
- 2019 OCQ2
- 2019 OCQ1
- 2019 OCCH
- 2018 TRQ4
- 2018 TRQ3
- 2018 TRQ2
- 2018 TRQ1
- 2018 TRCH
- 2018 Tasman Double
- 2018 Tall Ships
- 2018 SUPSOL
- 2018 SSANZ Triple
- 2018 SRQ4
- 2018 SRQ3
- 2018 SRQ2
- 2018 SRQ1
- 2018 SPRCH
- 2018 Shetland
- 2018 Shackleton Challenge
- 2018 OCQ4
- 2018 OCQ3
- 2018 OCQ2
- 2018 OCQ1
- 2018 OCCH
- 2018 40CH
- 2017 TS RDV
- 2017 TRQ4
- 2017 TRQ3
- 2017 TRQ2
- 2017 TRQ1
- 2017 TRCH
- 2017 Tasman Double
- 2017 Tall Ships
- 2017 SWR
- 2017 SUPSOL
- 2017 SSANZ Triple
- 2017 SSANZ RNI
- 2017 SPRR3
- 2017 SPRR2
- 2017 SPRR1
- 2017 SPRCH
- 2017 Red Dot
- 2017 OCQ4
- 2017 OCQ3
- 2017 OCQ2
- 2017 OCQ1
- 2017 OCCH
- 2017 40CQ3&4
- 2017 40CQ1&2
- 2016 TRQ4
- 2016 TRQ3
- 2016 TRQ2
- 2016 TRQ1
- 2016 TRCH
- 2016 Tasman Double
- 2016 Tall Ships
- 2016 SUPSOL
- 2016 SSANZ Triple
- 2016 SRQ4
- 2016 SRQ3
- 2016 SRQ2
- 2016 SRQ1
- 2016 SPRCH
- 2016 RTWR
- 2016 OCQ4
- 2016 OCQ3
- 2016 OCQ2
- 2016 OCQ1
- 2016 OCCH
- 2016 Corporate Open Gold
- 2016 A3
- 2015 TRQ4
- 2015 TRQ3
- 2015 TRQ2
- 2015 TRQ1
- 2015 TRCH
- 2015 Tasman Double
- 2015 Tall Ships
- 2015 SYQ4
- 2015 SYQ3
- 2015 SYQ2
- 2015 SYQ1
- 2015 SYCCH
- 2015 SUPSOL
- 2015 SSANZ Triple
- 2015 SRQ4
- 2015 SRQ3
- 2015 SRQ2
- 2015 SRQ1
- 2015 SPRCH
- 2015 OCQ4
- 2015 OCQ3
- 2015 OCQ2
- 2015 OCQ1
- 2015 OCCH
- 2015 Aegean Rally
- 2014 Timed Races Championship
- 2014 Tasman Double
- 2014 Tall Ships
- 2014 SYC Championship
- 2014 SSANZ Trio
- 2014 SSANZ RNI
- 2014 Sprints Championship
- 2014 Scandinavian Tour
- 2014 Round The World Race
- 2014 Ocean Championship
- 2014-2015 Sailonline World Race
- 2013 Tall Ships
- 2013 SYC Championship
- 2013 SSANZ B&G Simrad
- 2013 Capt Anderson
- 2012 W Australia Regatta
- 2012 Tall Ships
- 2012 SSANZ B&G Simrad
- 2012 RNZ Two Handed
- 2012 Global Challenge
- 2012 Ecker Cup
- 2012 Black Sea
- 2012 A3
- 2011 Vancouver Island
- 2011 Tasman Double
- 2011 SSANZ B&G Simrad
- 2011 SOL Global Challenge
- 2011 SJORA Series
- 2011 Scandinavian Tour
- 2011 Round North Island
- 2011 Asian Sprints
- 2011-2012 SOL World Race
- 2010 Tasman Double
- 2010 Ouzo Rally
- 2010 Iberian Tour
- 2010 Auckland Regional
- 2009 French SOLo
- 2009 Bosphore - Bretagne
- 2008 SYCC
- 2008 -2013 SYC Week Race Championship
- 2008 -2013 SYC Week-End Race Championship
- 2008 -2013 SYC Ocean Race Championship
- 2008-2009 Sailonline Ocean Race
- 2004 LOOR
Mobile Client
SYC members have the benefit of access to our mobile/lightweight web client!